10月7日から10日の日程でJVRC(Japan Virtual Robotics Challenge)が開催され、MIDとして参戦してきました。
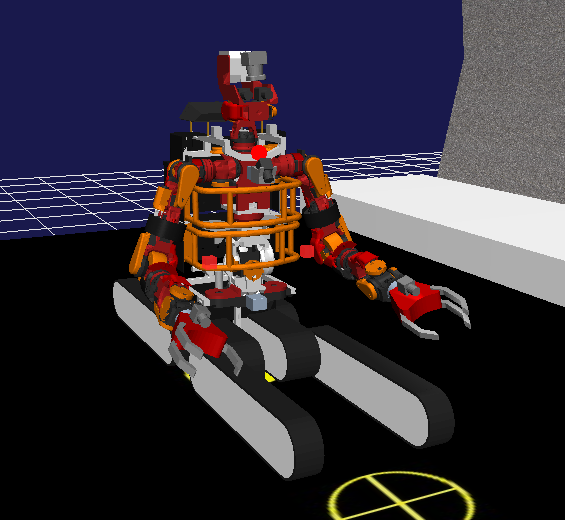
利用したロボットはCreative Commonsライセンスで公開されているJAXONを改変(派生)させたMIDJAXONというロボットで上半身はヒューマノイド型、下半身はクローラー型の形をしています。
成績はというと、全チーム中最高得点をとり総合優勝、更にチャレンジタスクへのチャレンジが認められJVRC賞も同時受賞、ということで最高の結果を残すことができました。
以下のサイトで競技終了後の技術交流会の様子を見ることができます。
http://www.ustream.tv/recorded/75191534
技術交流会でも言っているのですが、結果から見ると1位下半身クローラー型、2位クローラー型、3位ヒューマノイド型、でクローラー型が有利かと思われがちなのですが、公式の順位からは実はAIST-NEDO、NEDO-JSK、NEDO-HydraのDRC参加組が外されており、DRC参加組も含めた「裏順位」は、1位下半身クローラー型(MID)、2位ヒューマノイド型(AIST-NEDO)、3位ヒューマノイド型(NEDO-JSK)と初日に僅差でAIST-NEDOに勝っていたMIDがヒューマノイド勢の猛追を逃げ切ったという形になっており、まったくもってクローラー型が有利というわけではありません。制御しきることができればヒューマノイド型の勝ち、そこからクローラー型の安定性を活かした操縦で逃げ切った、というのが本当のところですので、今後のロボット設計の参考にしていただければと思います。
ともあれ、大会出場前に大会で使ったソースコードの公開を約束していたので、以下に公開します。



